 |
|||||||||||||||
|
Ich habe mir einen Kreuztisch der mit Handkurbeln bestückt war, umgebaut. |
|||||||||||||||
|
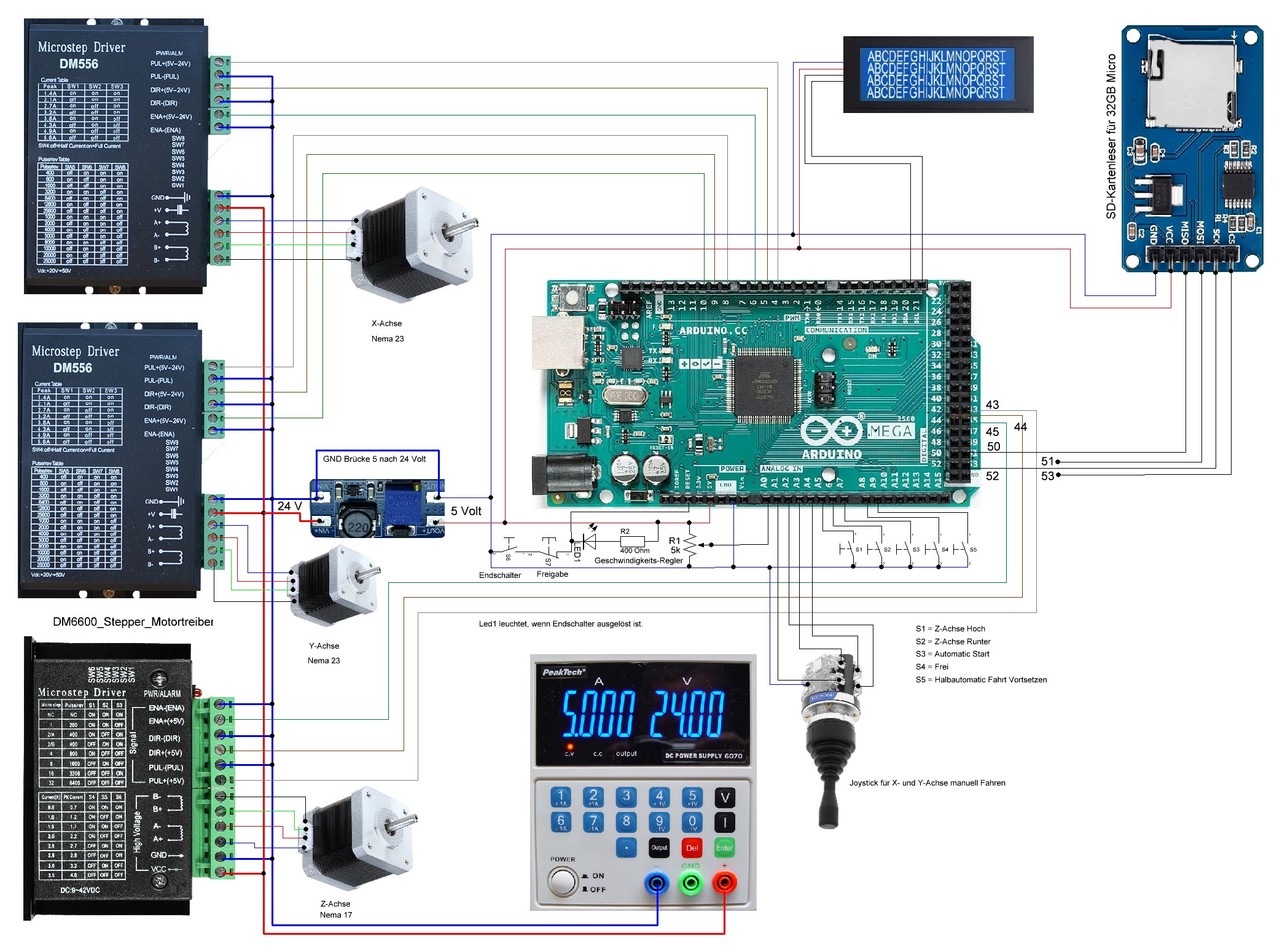
Ich habe mir damit keine Vollwertige Fräse gebaut, sondern möchte nur Eckige Öffnungen ausfräsen können. Dazu habe ich die Kurbeln abgebaut und zwei Nema 23 Motoren ersatzweise angebaut. Die Maße gebe ich am PC in Excel ein und übertrage sie auf eine SD Karte. Diese Karte kommt in die Steuerung des Kreuztisches, der Startpunkt der Arbeiten wird Manuel angefahren, und wenn der Fräser exakt am Startpunkt steht, wird auf die Taste “Start” gedrückt. Dann geht die Fahrt ab. |
|||||||||||||||
 |
|||||||||||||||
|
Hier ist noch die Steuerung, in der sich der Arduino Mega, die drei Motortreiber, der Kartenleser und die Manuelle Steuerung der drei Motoren und das Netzteil befindet. |
|||||||||||||||
 |
|||||||||||||||
 |
|||||||||||||||
|
Arduino, Uno, Mega, RC3231, Schrittmotor, Treiber, RFID, DC, RC, 5 Volt, 3,3 Volt, PWM, Pin, Analog Pin, https://www.nof-schule.de/forum/ |
|||||||||||||||
{kind=link}